En essència, la màquina-eina és una eina perquè la màquina guiï el camí de l'eina, no mitjançant una guia directa i manual, com ara les eines manuals i gairebé totes les eines humanes, fins que la gent va inventar la màquina-eina.
El control numèric (NC) fa referència a l'ús de la lògica programable (dades en forma de lletres, números, símbols, paraules o combinacions) per controlar automàticament les eines de mecanitzat. Abans d'aparèixer, les eines de processament sempre estaven controlades per operadors manuals.
El control numèric per ordinador (CNC) fa referència a l'enviament d'instruccions codificades amb precisió al microprocessador del sistema de control de l'eina de mecanitzat, per tal de millorar la precisió i la consistència. El CNC del que es parla avui quasi tots es refereixen a fresadores connectades a ordinadors. Tècnicament parlant, es pot utilitzar per descriure qualsevol màquina controlada per un ordinador.
Durant el segle passat, molts invents han posat les bases per al desenvolupament de màquines eina CNC. Aquí, analitzem quatre elements bàsics del desenvolupament de la tecnologia de control numèric: les primeres màquines eina, targetes perforades, servomecanismes i llenguatge de programació d'eines de programació automàtica (APT).
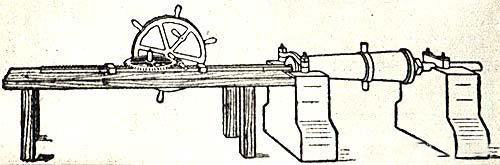
Les primeres màquines-eina
Durant la segona revolució industrial a Gran Bretanya, James Watt va ser elogiat per haver creat la màquina de vapor que va impulsar la revolució industrial, però va trobar dificultats per fabricar la precisió dels cilindres de la màquina de vapor fins que el 1775, John Johnwilkinson va crear el que es coneix com la primera màquina-eina del món. per avorrir cilindres de màquines de vapor i es va resoldre. Aquesta màquina avorrida també està dissenyada per Wilkinson basant-se en el seu canó original;
Targeta perforada
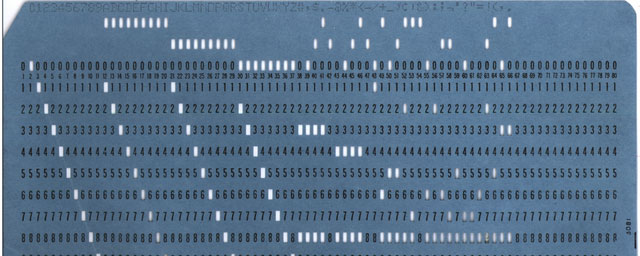
El 1725, Basile bouchon, un treballador tèxtil francès, va inventar un mètode per controlar els telers mitjançant l'ús de dades codificades en cintes de paper a través d'una sèrie de forats. Tot i que és innovador, el desavantatge d'aquest mètode també és evident, és a dir, encara necessita operadors. El 1805, Joseph Marie jacquard va adoptar aquest concepte, però es va reforçar i simplificar mitjançant l'ús de targetes perforades més fortes disposades en seqüència, automatitzant així el procés. Aquestes targetes perforades es consideren àmpliament la base de la informàtica moderna i marquen el final de la indústria de l'artesania domèstica en el teixit.
Curiosament, els telers jacquard es van resistir en aquell moment pels teixidors de seda, que es preocupaven que aquesta automatització els privaria de la seva feina i dels seus mitjans de vida. Van cremar repetidament els telers posats en producció; Tanmateix, la seva resistència va resultar inútil, perquè la indústria reconeixia els avantatges dels telers automatitzats. El 1812, s'utilitzaven 11.000 telers jacquard a França.

Les targetes perforades es van desenvolupar a finals del 1800 i van trobar molts usos, des del telègraf fins al piano automàtic. Encara que el control mecànic va ser decidit per les primeres cartes, l'inventor nord-americà Herman Hollerith va crear un tabulador electromecànic de targetes perforades, que va canviar les regles del joc. El seu sistema es va patentar el 1889, quan treballava per a l'Oficina del Cens dels Estats Units.
Herman Hollerith va fundar l'empresa tabuladora el 1896 i es va fusionar amb altres quatre empreses per establir IBM el 1924. A la segona meitat del segle XX, les targetes perforades es van utilitzar per primera vegada per a l'entrada i emmagatzematge de dades d'ordinadors i màquines de control numèric. El format original té cinc files de forats, mentre que les versions posteriors tenen sis, set, vuit o més files.
Mecanisme servo
El mecanisme servo és un dispositiu automàtic que utilitza retroalimentació inductiva d'errors per corregir el rendiment de la màquina o mecanisme. En alguns casos, el servo permet que els dispositius d'alta potència siguin controlats per dispositius amb una potència molt inferior. El servomecanisme està format per un dispositiu controlat, un altre dispositiu que dóna ordres, un instrument de detecció d'errors, un amplificador de senyal d'error i un dispositiu (servomotor) que corregeix els errors. Els servosistemes solen utilitzar-se per controlar variables com la posició i la velocitat, i els més habituals són els elèctrics, pneumàtics o hidràulics.
El primer servomecanisme elèctric va ser fundat per H. calendar a Gran Bretanya l'any 1896. El 1940, el MIT va crear un laboratori especial de servomecanisme, que va sorgir de la creixent atenció del Departament d'enginyeria elèctrica a aquest tema. En el mecanitzat CNC, el sistema servo és molt important per aconseguir la precisió de tolerància requerida pel procés de mecanitzat automàtic.
Eina de programació automàtica (APT)
L'eina de programació automàtica (APT) va néixer al laboratori de servomecanisme de l'Institut Tecnològic de Massachusetts l'any 1956. És un assoliment creatiu del grup d'aplicacions informàtiques. És un llenguatge de programació d'alt nivell fàcil d'utilitzar, que s'utilitza especialment per generar instruccions per a màquines eina CNC. La versió original era anterior a FORTRAN, però les versions posteriors es van reescriure amb Fortran.
Apt és un llenguatge creat per treballar amb la primera màquina NC del MIT, que és la primera màquina NC del món. Aleshores va continuar convertint-se en l'estàndard de programació de màquines-eina controlada per ordinador, i va ser àmpliament utilitzat als anys setanta. Més tard, el desenvolupament d'apt va ser patrocinat per la força aèria i finalment es va obrir al sector civil.
Douglas T. Ross, el cap del grup d'aplicacions informàtiques, és conegut com el pare d'apt. Més tard va encunyar el terme "disseny assistit per ordinador" (CAD).
El naixement del control numèric
Abans de l'aparició de les màquines eina CNC, el primer és el desenvolupament de màquines eina CNC i les primeres màquines eina CNC. Tot i que hi ha algunes diferències en les diferents descripcions dels detalls històrics, la primera màquina-eina CNC no només és una resposta als reptes de fabricació específics als quals s'enfronten els militars, sinó també un desenvolupament natural del sistema de targetes perforades.
"El control digital marca l'inici de la segona revolució industrial i l'arribada de l'era científica en què el control de màquines i processos industrials passarà d'esborranys imprecís a precisos". – Associació d'enginyers de fabricació.
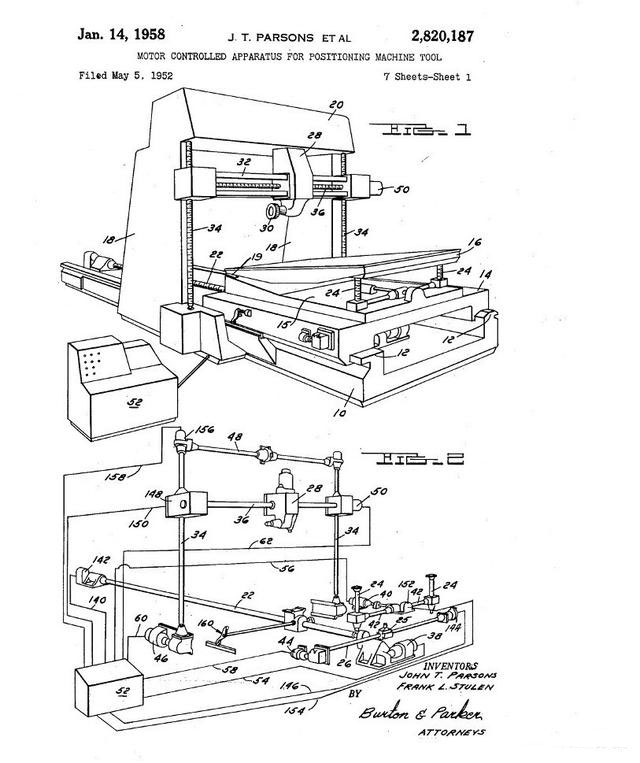
L'inventor nord-americà John T. Parsons (1913 – 2007) és àmpliament considerat com el pare del control numèric. Va concebre i va implementar la tecnologia de control numèric amb l'ajuda de l'enginyer aeronàutic Frank L. stulen. Com a fill d'un fabricant de Michigan, Parsons va començar a treballar com a muntador a la fàbrica del seu pare als 14 anys. Més tard, va posseir i va operar diverses plantes de fabricació sota l'empresa familiar Parsons manufacturing company.
Parsons té la primera patent de NC i va ser seleccionat al Saló de la fama dels inventors nacionals pel seu treball pioner en el camp del control numèric. Parsons té un total de 15 patents, i altres 35 es concedeixen a la seva empresa. La societat d'enginyers de fabricació va entrevistar a Parsons l'any 2001 per fer que tothom conegués la seva història des de la seva perspectiva.
Horari NC primerenc
1942:John T. Parsons va ser subcontractat per Sikorsky Aircraft per fabricar pales de rotor d'helicòpter.
1944:a causa del defecte de disseny de la biga de l'ala, una de les primeres 18 pales que van fabricar va fallar, i va provocar la mort del pilot. La idea de Parsons és punxar la pala del rotor amb metall per fer-la més forta i substituir la cola i els cargols per subjectar el conjunt.
1946:la gent volia crear una eina de fabricació per produir fulles amb precisió, cosa que era un repte enorme i complex per a les condicions d'aquell moment. Per tant, Parsons va contractar l'enginyer aeronàutic Frank Stulen i va formar un equip d'enginyeria amb tres persones més. Stulen va pensar a utilitzar targetes perforades IBM per determinar el nivell d'estrès a la fulla i van llogar set màquines IBM per al projecte.
L'any 1948, l'objectiu de canviar fàcilment la seqüència de moviment de les màquines-eina automàtiques es va aconseguir de dues maneres principals, en comparació amb només establir una seqüència de moviment fixa, i s'està duent a terme de dues maneres principals: control traçador i control digital. Com podem veure, el primer ha de fer un model físic de l'objecte (o almenys un dibuix complet, com ara el telèfon hidroelèctric de Cincinnati cable tracer). La segona no és completar la imatge de l'objecte o part, sinó només abstraure-la: models matemàtics i instruccions de màquina.
1949:la força aèria nord-americana necessita l'ajuda d'una estructura d'ala d'ultra precisió. Parsons va vendre la seva màquina CNC i va guanyar un contracte per valor de 200.000 dòlars per fer-ho realitat.
1949:Parsons i stulen han estat treballant amb Snyder machine & tool Corp. per desenvolupar màquines i es van adonar que necessitaven servomotors per fer que les màquines funcionin amb precisió. Parsons va subcontractar el servosistema de la "fresadora card-a-matic" al laboratori de servomecanisme de l'Institut Tecnològic de Massachusetts.
1952 (maig): Parsons va sol·licitar una patent per a "dispositiu de control de motor per al posicionament de màquines-eina". Va concedir la patent el 1958.
1952 (agost):com a resposta, el MIT va sol·licitar una patent per al "servosistema de control numèric".
Després de la Segona Guerra Mundial, la Força Aèria dels EUA va signar diversos contractes amb Parsons per desenvolupar encara més la innovació de mecanitzat NC feta pel seu fundador John Parsons. Parsons estava interessat en els experiments que s'estaven duent a terme al laboratori de servomecanismes del MIT i va proposar que el MIT es convertís en un subcontractista del projecte el 1949 per proporcionar experiència en control automàtic. En els següents 10 anys, el MIT va aconseguir el control de tot el projecte, perquè la visió del "control continu de la trajectòria de tres eixos" del laboratori de servo va substituir el concepte original de Parsons de "tall en posicionament de tall". Els problemes sempre configuren la tecnologia, però aquesta història especial registrada per l'historiador David Noble s'ha convertit en una fita important en la història de la tecnologia.
1952:El MIT va demostrar el seu sistema de cinturó perforat de 7 carrils, que és complex i car (250 tubs de buit, 175 relés, en cinc armaris de mida de nevera).
La fresadora CNC original del MIT l'any 1952 va ser Hydro Tel, una empresa de fresadores de Cincinnati de 3 eixos modificada.
Hi ha set articles sobre "màquina autorregulada, que representa una revolució científica i tecnològica que donarà forma efectiva al futur de la humanitat" a la revista "control automàtic" de Scientific American el setembre de 1952.
1955:Els controls de Concord (compostos per membres de l'equip original del MIT) van crear un numèric, que va substituir la cinta perforada a les màquines MIT NC amb el lector de cintes desenvolupat per GE.
Emmagatzematge de cinta
1958:Parsons va obtenir la patent dels EUA 2820187 i va vendre la llicència exclusiva a Bendix. IBM, Fujitsu i General Electric van obtenir subllicències després de començar a desenvolupar les seves pròpies màquines.
1958:El MIT va publicar un informe sobre economia NC, que va concloure que l'actual màquina NC no estalviava realment temps, sinó que transferia la mà d'obra del taller de la fàbrica a les persones que feien cinturons perforats.
Hora de publicació: 19-jul-2022